Deskinator — Autonomous Desk-Cleaning Robot
Overview
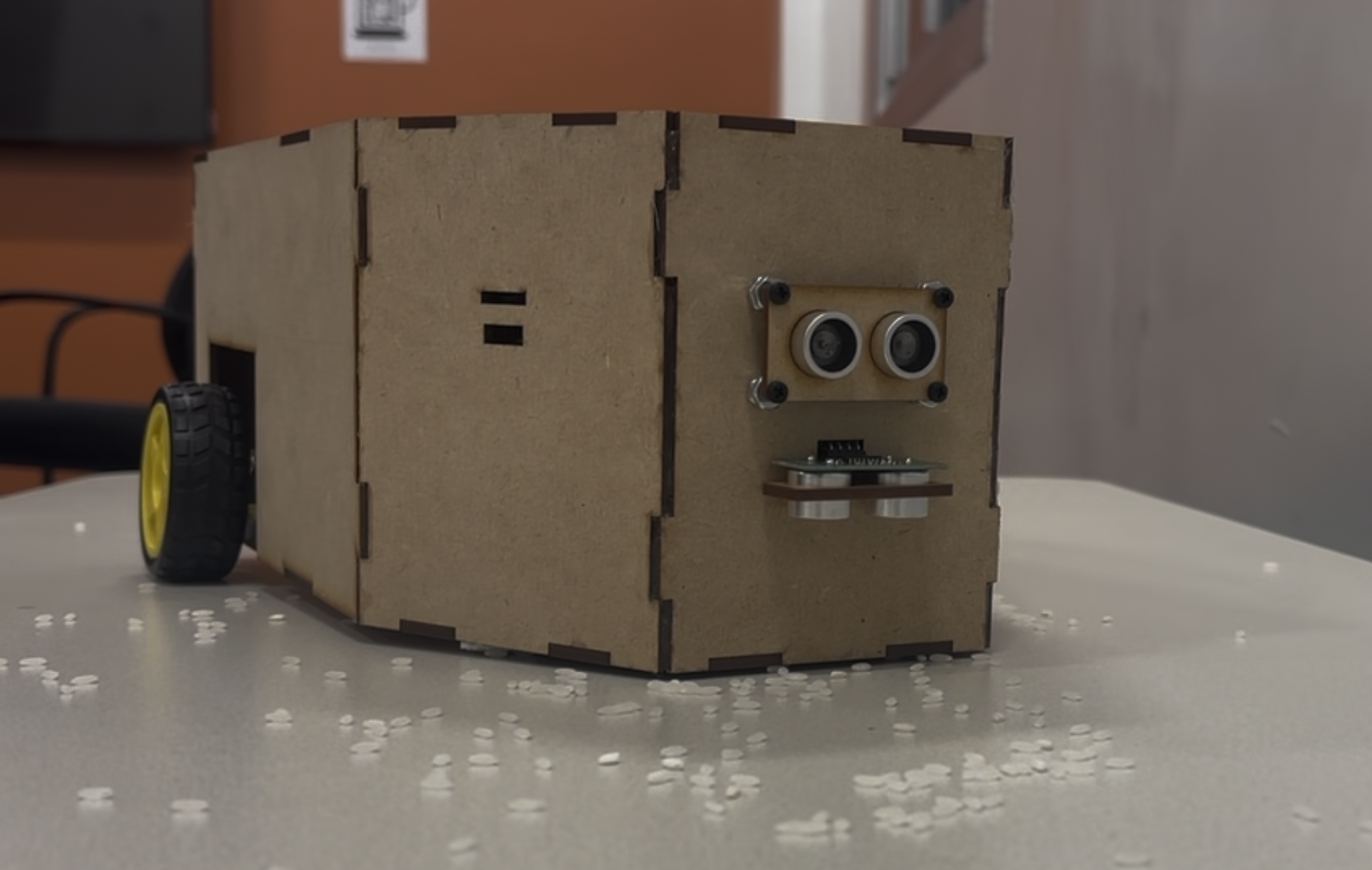
Deskinator is an autonomous desk-cleaning robot built for EK210: Introduction to Engineering Design. The robot vacuums small debris from flat desk surfaces while autonomously navigating, avoiding obstacles, and detecting desk edges to prevent falls. The project was designed and built end-to-end, with a focus on mechanical design, embedded systems, sensing, and rapid prototyping.
Technologies Used
- CAD & Fabrication: Fusion 360, Onshape, laser-cut MDF, FDM 3D printing
- Embedded Systems: Arduino Uno, C++, PlatformIO
- Electronics: Ultrasonic sensors, motor driver, relay, LEDs, buzzer
- Mechanical: Differential drive, caster wheel, centrifugal fan
- Power: Rechargeable 3S LiPo battery
Key Features
- Fully autonomous, wire-free operation
- Obstacle avoidance and desk-edge detection using ultrasonic sensors
- Custom 3D-printed vacuum chamber with internal debris baffle
- Centrifugal fan for debris collection
- Visual and audio state feedback (LED + buzzer)
Design Highlights
I designed a custom vacuum chamber in Fusion 360 that integrates directly with the baseplate and prevents debris from entering the fan using an internal baffle. The robot uses a rear differential drive with a front caster suspended to minimize ground clearance and improve suction efficiency. An Arduino-based controller coordinates motor motion, sensor feedback, and system state during autonomous cleaning cycles.
Performance & Evaluation
- Consistently collected >60% of debris across trials
- Remained autonomous for >60 seconds without human intervention
- Fell less than 5% of the time during operation
- Completed a full cleaning cycle on a single charge
- Total cost: $97.51 (under $200 budget)
The system did not pass repeated IEC freefall tests from desk height, revealing limitations in internal mounting and enclosure robustness.
My Contributions
- Mechanical CAD (vacuum chamber, enclosure integration)
- Embedded C++ control logic and sensor integration
- Power and motor system integration
- Prototyping, testing, and performance analysis
Outcome
Deskinator successfully met its core functional goals and provided hands-on experience building a complete autonomous robotic system. The project emphasized iterative design, system integration, and learning from real-world mechanical and electrical failure modes.
Created during my third semester @ Boston University, December 2025

Deskinator about to pick up rice, its favorite thing to do
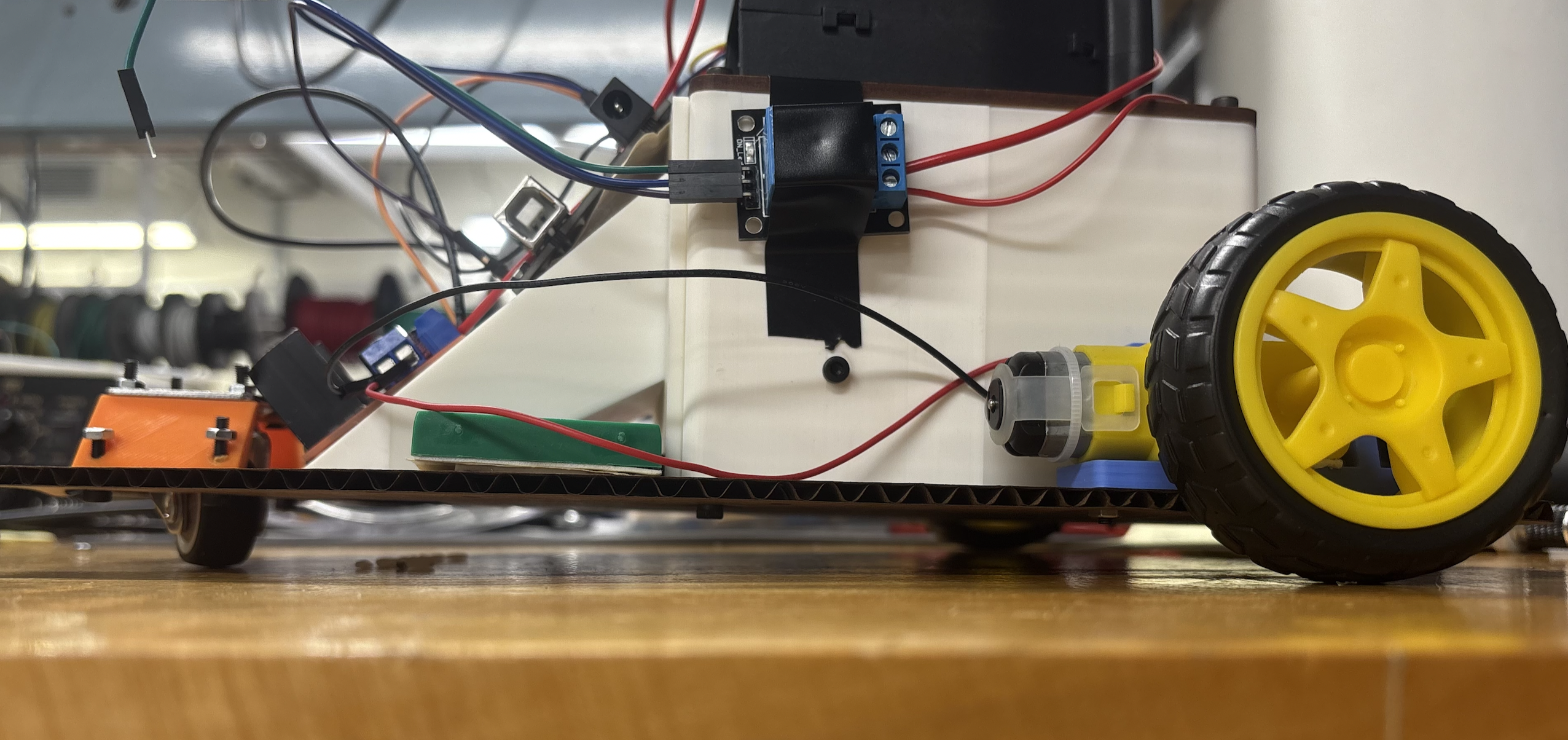
Internals of Deskinator prototype