Overview
An Arduino-controlled, 3D-printed rope-traveling robot designed to count laps while carrying a sheep. Built for my senior year “Battle of the Classes” theme: Sweet Dreams Seniors.
Technologies Used
- CAD: Fusion 360
- Programming: C++, PlatformIO
- Electronics: Arduino, DC motor, LiPo battery, L298N motor controller, 7-seg display, switch
Key Features
- 3D-printed enclosure
- Battery-powered operation
- Reliable all-day runtime
Contributions
I assembled all electronics and handled soldering and wiring. The project relied heavily on spare parts, requiring extensive testing and connector reuse. A teammate designed most of the printed components, and our iteration cycle was fast and hands-on.
Challenges
Early designs overcomplicated direction switching using sensors. We ultimately learned that simple timed motion was sufficient, as mechanical constraints naturally limited travel at the rope ends.
Created during my final month at Millburn High School
Other Photos
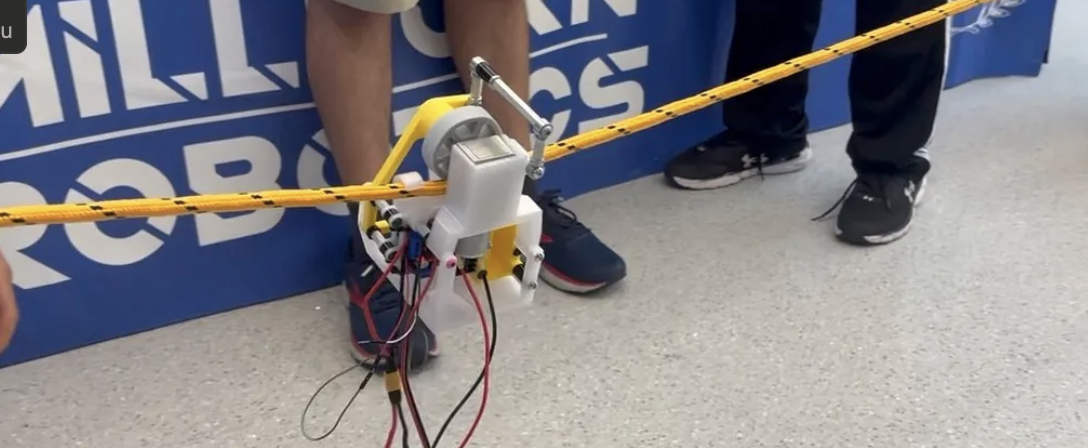
First prototype of rope traveling robot being tested in our robotics lab
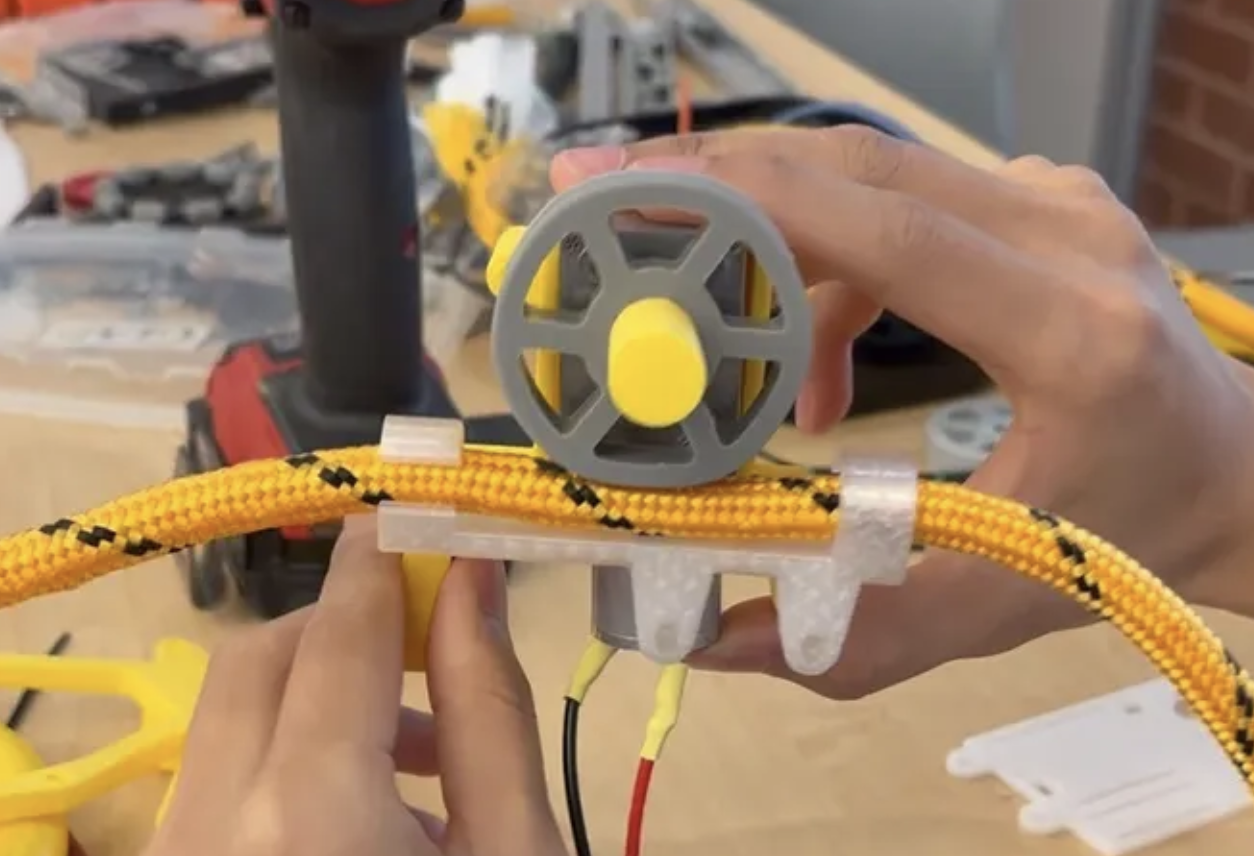
Testing the wheel's compression on the rope we found
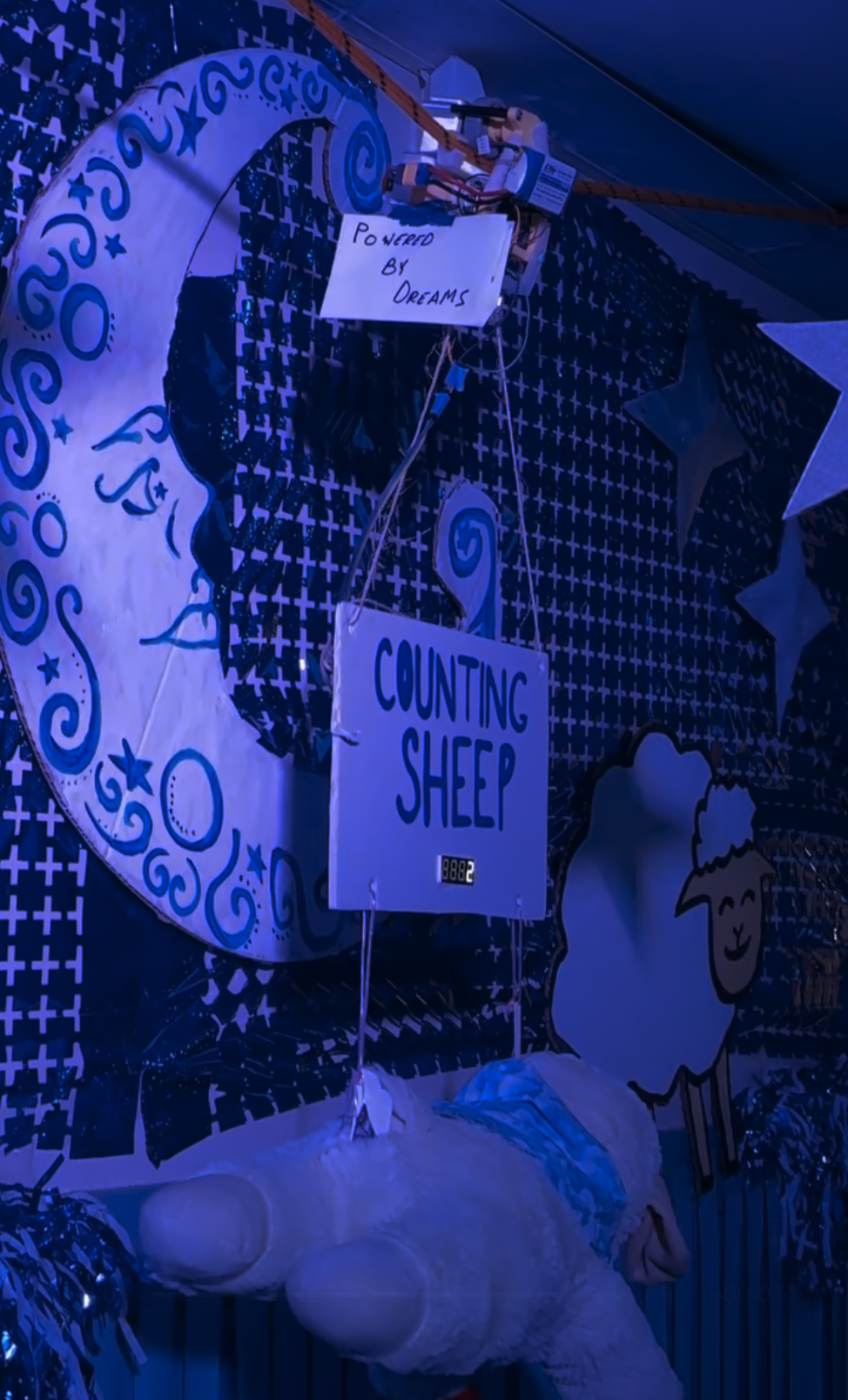
Powered by dreams